垃圾處理廠的異味監測一直是個棘手問題,監(jiān)測難點多,有一定的局限性。無人機搭載電子鼻,能(néng)否解決垃圾處(chù)理廠的異味(wèi)監測難題(tí)?
難點一:填埋場盲區多,汙染源難定位
傳統局(jú)限:人工巡檢無法覆蓋(gài)垃圾山、滲濾液池等危險區(qū)域,且異味擴散導致溯源模糊。
技(jì)術突破:
- 無(wú)人機通過激光雷達三(sān)維(wéi)建模,自主規劃巡檢路線,覆蓋填埋場、堆肥區全域;
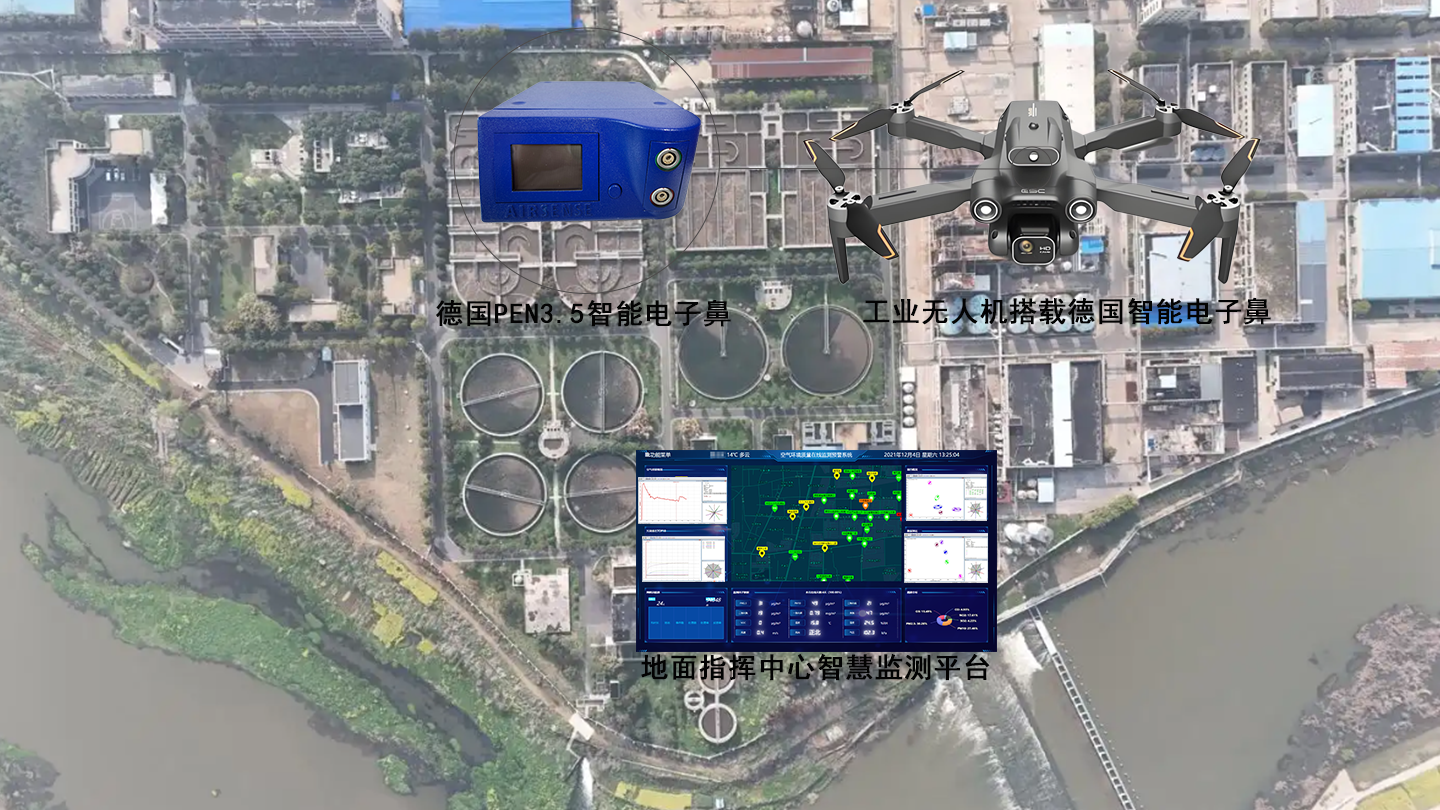
- PEN3.5電子鼻(bí)結合AI氣體指紋分析,生成三維(wéi)異味濃度(dù)熱力圖(精度±0.5m),精準鎖定腐爛堆體、覆蓋(gài)膜破損點或滲濾液泄漏源。
難點二:混合惡臭氣體快速識(shí)別難
傳統局限:手持設備單次檢測氣體種(zhǒng)類(lèi)有限,無法實時分析H₂S、NH₃、VOCs等多(duō)組分混合氣體。
技術突破:
- PEN3.5電子鼻內置10組抗交叉幹擾傳感器,0.1秒/次同步檢測(cè)8類惡臭成分;
- AI模型實時比對《惡臭汙染排放標準》(GB 14554),超標濃度自動標紅並關(guān)聯汙染源(yuán)坐標。
難(nán)點三:高危環境(jìng)威脅作業安全
傳統(tǒng)局限:填埋場沼氣易燃易爆,酸性氣體腐蝕設備,人員近場巡檢風險高(gāo)。
技術突破:
- 無人機配備防(fáng)爆電機與紅外熱成像,避開高溫沼氣聚集區(監測距離≥50m);
- PEN3.5電子鼻采用鈦合金抗(kàng)腐蝕腔體,動態稀釋模塊支持(chí)0-5000ppm濃度檢測,極端環境下(xià)連續工作≥8小時。
難(nán)點四:異味擴散動態管控難
傳統局限:異味傳播受風向、地形遮擋(dǎng)影響,固定監(jiān)測(cè)點數據(jù)滯後(hòu)。
技(jì)術突破:
- 無人機集群同步采集氣象數據(風速、溫濕度)與氣體濃度;
- 構(gòu)建“氣體-地形-氣象”擴散模型,預測未來2小時異味影響範圍,智能規劃霧炮車除(chú)臭路徑(誤差(chà)<10%)。
難點五:合規成本高,長效管理缺數據
傳統局限:人工檢測報告耗(hào)時(shí)且易篡改,曆史數據未用於工藝優(yōu)化。
技術突破:
- 監測數據(jù)區塊鏈存證,自動生成環保(bǎo)部門認可的《異味溯源報告》;
- AI分析曆史數據,識別填埋作業薄弱(ruò)環節(jiē)(如覆蓋率不足區域),指導封場方案優化,降低(dī)30%重複治理成本。
技術價值:
通過“空中機動平台+智能嗅覺感知+數據融合決策”三位(wèi)一體架構,實現垃圾處理廠異味監測從“單點抽查”到“全域透視”、“人工(gōng)幹預”到“AI自(zì)治”、“末(mò)端治理”到“源頭防控”的跨越式升級(jí),為“無廢城市”建設提供可複用的數字化(huà)治理範式。
微信掃一掃
